一、新能源车赛道-太阳能电动车
(一)
赛道 |
赛项 |
指导教师 |
参赛学生姓名 |
新能源车赛道 |
太阳能电动车 |
贾楠 |
李丹 |
黄翔晖 |
郑天乐 |
杨佳颐 |
陆忆源 |
1.作品简介
本作品获得2025年工创赛太阳能小车赛道陕西省排名第二名,
陕西省省级特等奖,西安理工大学校级一等奖。
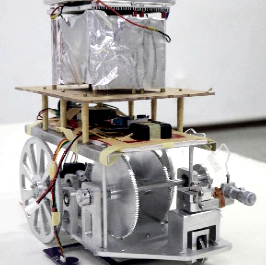
1.本作品是一款基于太阳能驱动的小型电动车,设计涵盖机械结构、电控系统与外观风格三大方面,充分体现绿色能源应用与工程创新能力。
2.机械结构方面,小车采用独特的盘形凸轮与转向前叉轮组合的转向结构,搭配可调式推杆,实现精准灵活的方向控制。凸轮机构通过UG、SW等软件进行设计仿真,精确拟合行程规律,确保运动平稳。动力系统采用差速器传动设计,通过电机驱动小齿轮,带动开放式差速器,将动力合理分配至两侧车轮,增强操控与稳定性。传动机构进一步联动齿轮组与推杆,实现驱动与转向同步控制,结构紧凑、传动高效,适应复杂地形与赛道需求。
3.电控系统方面,系统主控采用STM32F103C8T6芯片,通过UART接口控制读卡、语音播报与LED显示模块,完成任务识别与交互反馈。电源采用6V 12W太阳能板与40F超级电容组结合供能,提升充电效率与稳定性,电容模块通过恒流恒压控制芯片CN3305进行安全高效充电,支持过压保护与状态指示。稳压电路基于TPS63020实现升降压功能,稳定输出5V电压供控制模块使用,整体系统具备高转换效率与低功耗特性。
4.外观设计方面,车体结构采用FDM 3D打印技术与PLA材料构建,并通过涂树脂增强强度与热稳定性,实现整车轻量化。外观灵感来源于韶山型电力机车,寓意传承与创新融合。磁吸式组装结构便于维护与更换,外形设计与主题“重走长征路”高度契合,强化作品的时代意义。
2.作品照片

(二)
赛道 |
赛项 |
指导教师 |
参赛学生姓名 |
新能源车赛道 |
太阳能电动车 |
贾楠 |
李丹 |
黄翔晖 |
郑天乐 |
杨佳颐 |
陆忆源 |
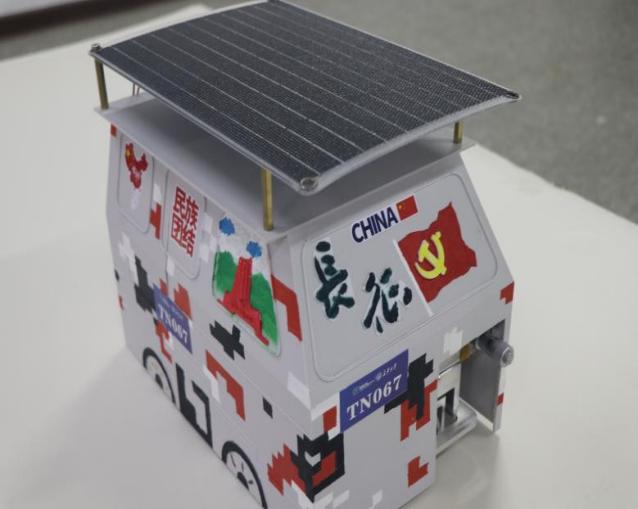
1.作品简介
太阳能新能源车是采用太阳能发电作为动力,要求参赛队自主创意和轻量化设计并制作一台具有方向控制功能的太阳能电动车,不能使用购买的成套组件或现成作品,并且转向只能采用机械机构来实现,不能使用任何电控装置控制电动车的转向,不能安装其他任何传感器。。该电动车主要由一块太阳能板、电池、电机及相关元器件和本体组成。该电动车最大外形尺寸满足铅垂方向投影不大于200mm×300mm(宽×长)的长方形,太阳能板尺寸不大于200mm×300mm(宽×长)。
该电动车通过太阳能板对电池进行充电,电机把电能转化为机械能通过皮带带动小车后轮转动从而驱动该电动车前行。小车的方向控制由一组齿轮机构和凸轮机构共同完成。齿轮机构进行减速,凸轮机构实现方向的变化。
太阳能电动车的现场运行路线是模拟长征路线。从长征起点“瑞金”出发,一路历经“突破第三道封锁线”“血战湘江”“强渡乌江”“占领遵义”“四渡赤水”“巧渡金沙江”“强渡大渡河”“飞夺泸定桥”“爬雪山”“懋功会师”“过草地”“激战腊子口”“会宁大会师”“吴起镇会议”等,长征会师后最终胜利抵达“延安”,一共设置16个主要地点作为备选标志点,其中“瑞金”和“延安”为必有标志点(现场决赛位置现场决定)。现场比赛时,选用“瑞金”“突破第三道封锁线”“血战湘江”“占领遵义”“巧渡金沙江”“飞夺泸定桥”“爬雪山”“过草地”“会宁大会师”和“延安”10个标志点依顺序标记。
2.作品照片

二、新能源车赛道-温差电动车
(一)
赛道 |
赛项 |
指导教师 |
参赛学生姓名 |
新能源车赛道 |
温差电动车 |
贾楠 |
刁鹏飞 |
冯国洋 |
席望浩 |
唐俊 |
李俊逸 |
1.作品简介
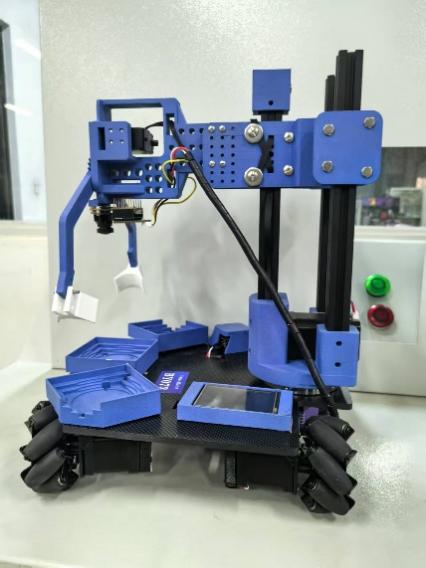
本作品以模拟长征情景为核心,设计适用于复杂场地的温差驱动智能小车,融合机械创新、能量管理与轻量化技术,实现精准路径规划与任务执行。
核心设计与创新:
1.转向传动系统:采用三级减速齿轮(30齿→46齿→120齿)放大扭矩,搭配凸轮导向与微调机构,通过光滑棒减少对微调机构的磨损,实现高转向精度。决赛需通过MATLAB公式重构凸轮轮廓(基于轨迹曲率半径R、车长L等参数),无需调整传动链,大幅提升场景适配效率。
2.高效温差发电模块:选用TEG1-241温差片(两片串联),热端内凹铝板增加火焰接触面积,冷端采用叠层铝鳍片+纯铜热管散热器,重量减轻30%的同时,温差提升20%,发电效率达8.5mW/K。配合防风布稳定热源,10ml酒精可将40F电容充至6V以上。
3.能量管理:超级电容模组(3×2.7V/100F串联)搭载TPS63070芯片,实现2-16V输入下5V稳定输出;BW6101被动均衡电路实时监测单体电压,0.7A泄流防止过充,模组寿命延长40%。充电电路采用CN3305升压芯片,转换效率达88%。
4.轻量化与集成设计:3D打印镂空车壳(带加强层)可减重40%,铝制部件镂空处理兼顾强度与重量;法兰轴承与润滑脂降低摩擦,堵转电流控制在0.3A以内。控制模块集成语音播报、打卡功能,缓启动机制确保首点反馈成功率100%。
通过轨迹优化公式与凸轮复用设计,实现初赛/决赛场景快速切换;散热与能量管理创新使系统稳定性提升30%,满足复杂路径下连续运行需求,兼具工程实践与红色主题的融合创新。
2.作品照片
作品实物图如下:


(二)
赛道 |
赛项 |
指导教师 |
参赛学生姓名 |
新能源车赛道 |
温差电动车 |
李余峰 |
赵建峰 |
郭锦洁 |
雷思杰 |
贾锌洲 |
杨嘉林 |
1、作品简介
温差电动车主要由一套酒精燃具、温差片模块或模组、充电模块、超级电容模组、稳压输出模块、语音播报模块、电能检测模块、电机及相关元器件和本体等组成。利用机械机构控制行进方向,其最大外形尺寸满足铅垂方向投影小于200mmx300mm。该温差电动车的生物质能是通过液态乙醇(高浓度)燃烧而获得,该温差电动车完成所有动作的能量均由生物质能转换成电能,且只有一个随车装载的超级电容模组且不允许外露,用于该温差电动车所有动作的能量,比赛过程中不能更换和充电。电动车上只有一个能把电能转化成机械能的、用于驱动该电动车前行电动元器件,转向只能采用机械机构来实现,不能借助任何电控方式控制温差电动车转向,不能安装其它任何传感器,不能采用任何无线通讯功能实施任何动作;温差电动车的运行场地控制在6000mmx6000mm正方形平面区域,采用规格550喷绘布印刷该温差电动车运行场地,必须在规定的运行赛场内按照顺序标记,运行场地上的红色圆为长征经过的主要地点,现场运行路线是从长征起点“瑞金(红五角星)出发,一路历经“突破第三道封锁线”、“血战湘江”、“强渡乌江”、“占领遵义”、“四渡赤水”、“巧渡金沙江”、“强渡大渡河”、“飞夺泸定桥”、“爬雪山”“懋功会师”、“过草地”、““会宁大会师”、“吴起镇会“激战腊子口”议”等,长征会师后到达长征胜利的最终落脚点“延安”(红五角星)结束,一共设置16个主要地点作为备选标志点,其中“瑞金”和“延安”为必有标志点。
2、作品照片

三、智能+赛道 智能物流搬运
(一)
赛道 |
赛项 |
指导教师 |
参赛学生姓名 |
智能+赛道 |
智能物流搬运 |
李丹 |
郝宇奇 |
胡晨阳 |
丁浩然 |
康嘉辉 |
王振杰 |
1.作品简介
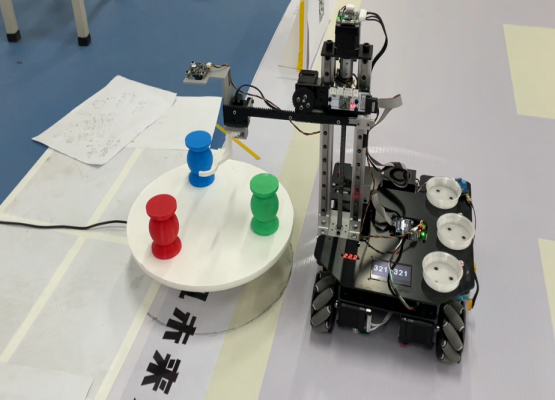
该机器人以“精准感知、智能控制、可靠通信”为核心,构建了融合多传感器、实时算法与抗干扰设计,实现复杂场景下的毫米级跑位控制与物流搬运抓取流程全自动化,在2025年中国大学生工程实践与创新能力大赛智能搬运赛道获得陕西省省级特等奖、校级二等奖。
全向高精度跑位:融合HWT101CT陀螺仪、4000PPR编码器并通过扩展卡尔曼滤波(EKF)实时解算位姿,在磁场强度>50μT的干扰环境下,定位精度保持±2cm,航向角漂移≤0.1°/min。
视觉检测:搭载星瞳科技OPENMV边缘视觉模块,基于LAB颜色空间图像二值化和“初筛-几何校验-时间滤波”多级目标筛选策略,提升像素识别精度并在50ms内完成色块识别与质心计算
位姿矫正:采用“位置环+速度环+角度环”三闭环PID架构,角度环引入模糊PID算法,进行实时位姿计算,在进行色环堆叠时通过视觉坐标反馈连续调整自身位姿,达到毫米级别堆叠精度。
电源管理:采用11.1V/2600mAh格氏3S航模电池,并通过LM2596S提供多路5V电源,低EMI,低纹波,高动态响应,保证系统稳定运行。
结构设计:机械臂转动以及滑台升降采用一主二从,三连杆结构,主连杆进行机械臂滑台升降,两从杆通过一体式滑轮为机械臂转动及滑台升降提供稳定性支撑,保证物块色环堆叠毫米级精度。
2.作品照片

(二)
赛道 |
赛项 |
指导教师 |
参赛学生姓名 |
智能+赛道 |
智能物流搬运 |
苏岩 |
刘军波 |
刘济畅 |
邓小安 |
邓可浩 |
步鑫贝 |
2.作品简介
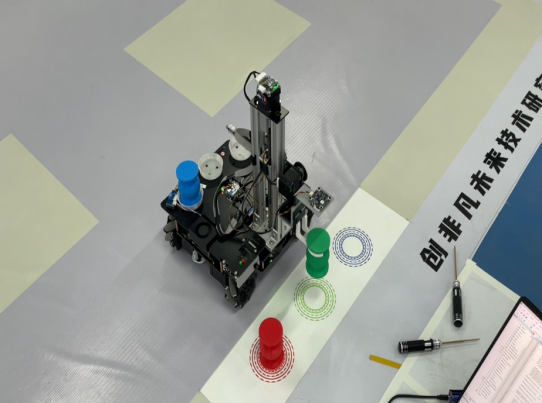
本作品为智能物流搬运赛项参赛机器人,由团队全流程自主研发,融合机械创新、电控集成与算法优化,专注实现高效精准的物料搬运任务。
一、全自主设计与技术创新
整车机械、电控、视觉及硬件均自主开发,核心PCB(主控 / 电源 / 拓展 / 塔吊转接)自主绘制打样,保障硬件系统的高集成与可靠性。机械结构创新性采用 “塔吊”设计,灵活性大大提高。
搭载双重算法:视觉算法通过抗干扰优化,在强光干扰或目标部分遮挡的情况下仍然可以准确识别目标;底盘定位结合麦克纳姆轮逆运动学解算,配合视觉校正算法,实现±2mm级精度,可精确按照预定轨迹运动,并无误差返回出发点。
二、任务效率与功能突破
通过全流程时序优化,平均完赛时间控制在2分15秒内。支持 “一键式” 自主运行,具备定位、二维码读取、多色物料跟踪抓取及色环1环精度码垛等功能。
能源系统采用自主设计的锂电池组,满足全程能耗需求,支持实时电压监测,支持电池热替换。
三、场景适配与工程价值
作品高集成、高稳定的特点,既满足赛事技术要求,也贴近智能制造对物流自动化的实际需求,展现从实验室到工业应用的转化潜力。
团队以 “自主创新 + 工程落地” 为目标,通过全自主设计制作,以敢于直面困难的精神,在赛事中呈现当代大学生的创新素养。
3.作品照片
四、智能+赛道 生活垃圾智能分类
(一)
赛道 |
赛项 |
指导教师 |
参赛学生姓名 |
智能+赛道 |
生活垃圾智能分类 |
雷小博 |
李余峰 |
雷傲 |
夏敬博 |
苏凯进 |
胡博文 |
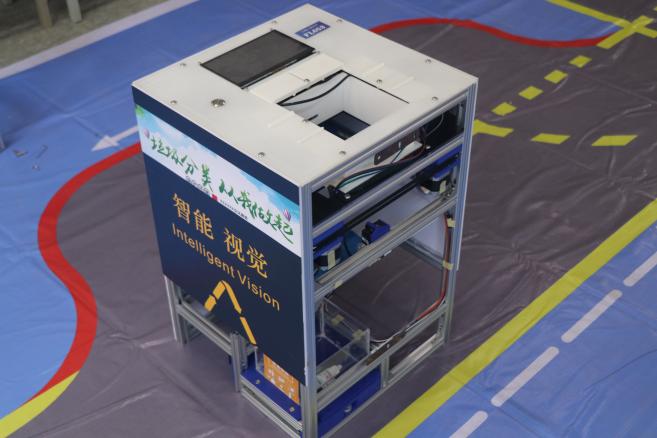
1.作品简介
本装置为“2025年中国大学生工程实践与创新能力大赛”《生活垃圾智能分类》赛项全国总决赛入围作品。
赛项规则要求参赛队自主设计并制作一款外观精致时尚、分类标识简洁醒目的单投入口生活垃圾智能分类装置(简称:垃圾分类装置)。除标准件外,非标零件应自主设计和制造,不允许使用购买的成品套件拼装而成,该垃圾分类装置具有自主判别、分类“可回收垃圾、厨余垃圾、有害垃圾和其他垃圾 ”等四类城市生活垃圾并投放到相应的垃圾桶、垃圾压缩、满载报警、播放自主设计制作的垃圾分类宣传片等功能。
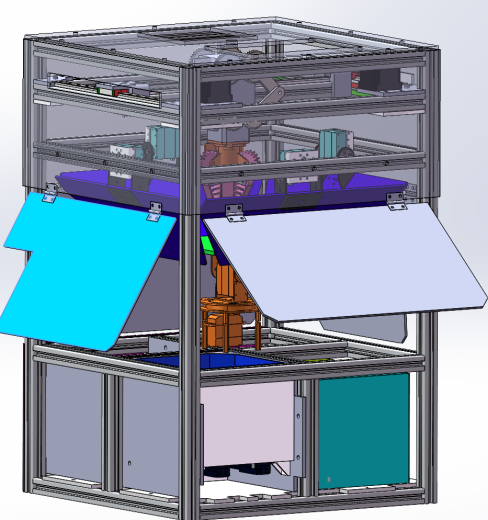
装置整体分为四层,第一层垃圾投入口和放置显示屏;第二层为机械爪和X-Y平台,第三层为二自由度云台和四周挡板,进行垃圾的单个分类;最下层放置四个垃圾和对可回收垃圾进行压缩。
分类执行方面,初赛主要依靠上位机部署目标检测算法,识别垃圾种类后,由云台根据接收的指令完成旋转投放;决赛中一次投放多个垃圾,则需要更精准识别各类垃圾的材质、形状、位置等特征,先由机械爪按可回收垃圾、厨余垃圾、其余垃圾、有害垃圾的顺序进行逐个分类,最后一类垃圾由云台分类投放。
2.作品照片
(二)
赛道 |
赛项 |
指导教师 |
参赛学生姓名 |
智能+赛道 |
生活垃圾智能分类 |
赵建峰 |
张喜 |
李文浩 |
吴志鹏 |
吴迪 |
方文杰 |
1.作品简介
在本次工创赛中,我们团队精心设计并制作了一款单投入口的生活垃圾智能分类装置。其外观精致时尚,分类标识简洁醒目,可实现对 “可回收垃圾、厨余垃圾、有害垃圾、其他垃圾” 四类城市生活垃圾的智能判别、分类与储存,为城市垃圾分类提供了高效的科技解决方案。
智能识别与精准分类:采用基于深度学习的计算机视觉识别技术,以树莓派5开发板为核心,通过摄像头采集垃圾图像,结合YOLO算法实现四类垃圾的精准识别。识别后,由树莓派5开发板通过串口发送识别信息数据包给STM32VET6单片机,单片机根据数据包信息驱动云台及机械爪执行投放动作。其中,机械爪的平面重复定位采用core xy结构,该结构具有响应速度快、重复定位高等特点,广泛运用于3D打印机、激光切割机等领域。根据智能分类垃圾桶的实际情况,我们编写了一套运动控制算法,使得机械爪定位精度达到±1mm,满足实际需求。
智能压缩与满载预警:装置配备垃圾压缩功能,可对投入的垃圾进行自动压缩,减少存储空间。同时,通过传感与检测技术实时监测垃圾桶状态,当垃圾满载时,系统自动触发报警提示,便于及时清运,有效解决传统垃圾桶满溢问题。
交互与场景适配:装置支持播放自主设计制作的垃圾分类宣传片,同时屏幕显示垃圾种类及垃圾数量。
2.作品照片